Comment les PME peuvent utiliser un métavers industriel pour explorer et déployer rapidement des solutions robotiques
Avec la contribution de Rédacteurs nord-américains de DigiKey
2024-11-21
Les robots et les robots collaboratifs (cobots) sont à la pointe des technologies d'automatisation des usines. Les jumeaux numériques et la réalité virtuelle (RV) sont à la pointe des outils de conception et de développement. Combinés, ils peuvent être exploités pour créer un métavers industriel qui permet d'accroître la productivité plus rapidement, même pour les petites et moyennes entreprises (PME).
Les concepteurs des PME peuvent bénéficier d'une interface simple et intuitive qui combine un jumeau numérique, un modèle virtuel très détaillé d'un objet physique comme un robot delta, linéaire ou multi-axes, et un environnement RV tridimensionnel (3D) pour permettre l'exécution et la vérification directes des séquences de mouvement du robot.
L'utilisation de ces fonctionnalités permet d'affiner et d'optimiser le système d'automatisation, même sans aucun matériel physique, et d'explorer rapidement de multiples possibilités de solutions.
Cet article commence par rappeler la distinction qui existe entre un jumeau numérique mathématique décrit par des données et un jumeau numérique visuel (jumeau RV), et explique comment les deux sont nécessaires pour créer le métavers industriel. Il présente ensuite un système de commande de robot et un logiciel associé d'Igus pouvant être utilisé pour simuler un robot sur une interface 3D (jumeau numérique visuel) sans utiliser de matériel physique, ainsi que des robots delta, linéaires et multi-axes compatibles qui peuvent servir à réaliser la solution optimisée.
Les jumeaux numériques et la réalité virtuelle sont des technologies complémentaires qui recourent à des formes de visualisation, des interactions et des matériels différents. Les jumeaux numériques sont des modèles de processus, de systèmes ou d'objets physiques basés sur des données. Ils sont conçus pour être utilisés tout au long du cycle de vie de l'élément modélisé, depuis la conception initiale jusqu'à sa mise hors service et son recyclage.
La réalité virtuelle est une technologie immersive, basée sur le visuel, qui fait également appel à des modèles numériques. Dans un environnement RV, il est possible de simuler les relations et les interactions entre les objets, comme un robot effectuant une tâche. Ainsi, bien que les deux technologies puissent être utilisées pour la conception et la simulation, la technologie du jumeau numérique est axée sur les considérations relatives au cycle de vie global, tandis que la réalité virtuelle se concentre sur les interactions entre les objets physiques.
Un métavers combine des jumeaux numériques et la réalité virtuelle dans un environnement virtuel, spécialement conçu pour favoriser les interactions en temps réel entre les objets numériques et les êtres humains. Il est souvent associé aux jeux, mais s'applique de plus en plus aux activités commerciales et industrielles.
Bienvenue dans l'iguverse
Igus a développé le métavers iguverse pour soutenir les interactions d'ingénierie dans les environnements industriels, tels que le développement et le déploiement de systèmes robotiques. L'iguverse peut être mis en œuvre grâce au logiciel Igus Robot Control (iRC) Cette application gratuite et sans licence permet aux utilisateurs de contrôler différents types de robots, notamment les robots delta, les cobots (bras robotiques) et les robots portiques.
Il fournit aux utilisateurs une interface 3D et plus de 100 exemples de programmes. La configuration système requise pour la mise en œuvre du logiciel iRC comprend un PC (au minimum un processeur Intel i5) exécutant Windows 10 ou 11 (64 bits) avec 500 Mo d'espace libre sur le disque et une connectivité réseau Ethernet ou sans fil.
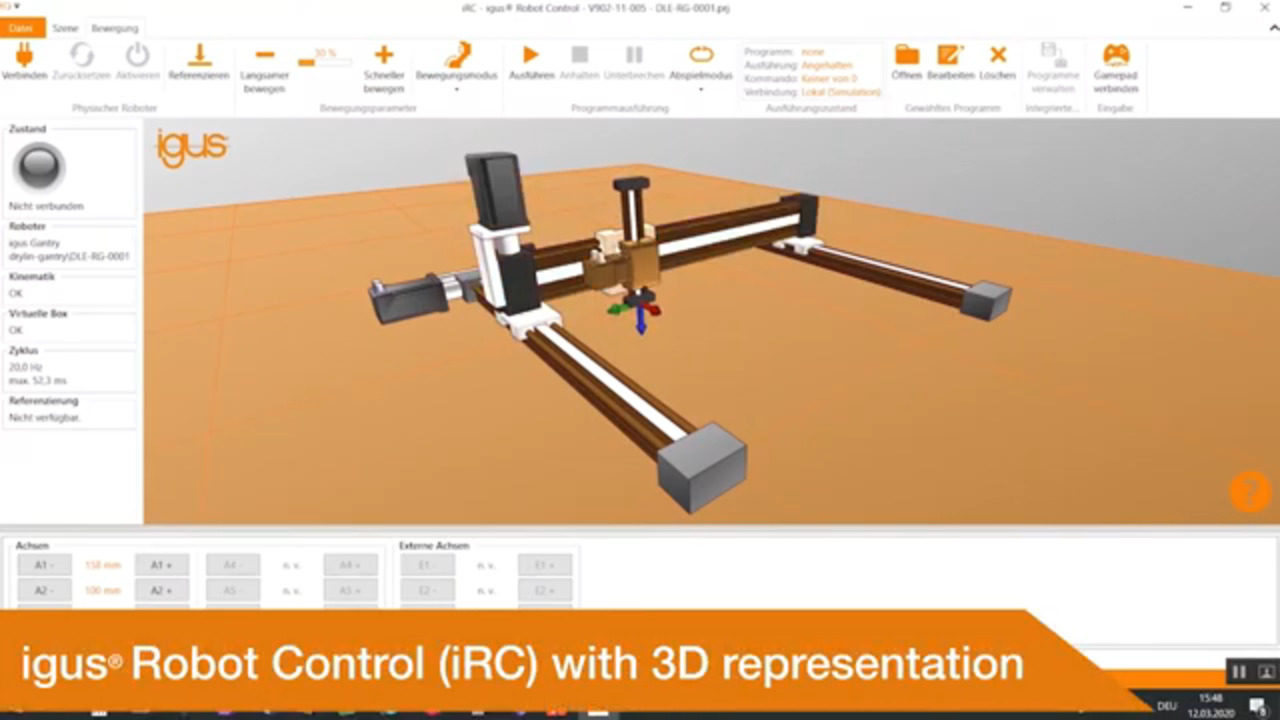
Le cœur du logiciel est un jumeau numérique 3D du robot en cours de programmation. Un robot à portique linéaire à trois axes comme le modèle DLE-RG-0001-AC-500-500-100 avec un espace de travail de 500 mm x 500 mm x 100 mm ou le modèle DLE-LG-0012-AC-800-500 de type actionneur xy à deux axes, avec un espace de travail de 800 x 500 mm en sont des exemples (Figure 1). Les concepteurs peuvent définir les mouvements en quelques clics de souris et utiliser le modèle 3D pour s'assurer que les mouvements requis sont réalisables, avant même d'acheter le robot.
 Figure 1 : Exemple de jumeau numérique RV 3D d'un robot portique à trois axes dans l'iguverse. (Source de l'image : Igus)
Figure 1 : Exemple de jumeau numérique RV 3D d'un robot portique à trois axes dans l'iguverse. (Source de l'image : Igus)
Outre le logiciel iRC, le contrôleur du robot est un élément clé de l'environnement de développement iguverse. Par exemple, le modèle IRC-LG12-02000 est destiné aux moteurs de 48 V, dispose de sept entrées et de sept sorties, ainsi que d'un câble de 10 m pour la connexion au robot. Les contrôleurs IRC comprennent des modules d'entraînement de moteur pour différentes grandeurs de moteurs pas-à-pas bipolaires et sont disponibles en versions configurables ou préconfigurées. Ce modèle dispose également de plusieurs interfaces pour l'intégration des systèmes, notamment :
- Interface d'automate programmable (PLC) pour le contrôle via les entrées et sorties numériques, en particulier pour faciliter le démarrage et l'arrêt des programmes via un automate programmable (PLC) ou un bouton-poussoir
- Interface Modbus TCP pour le contrôle via un automate programmable ou un PC
- Interface CRI (Common Robotic Interface) Ethernet pour le contrôle et la configuration à l'aide d'un automate programmable ou d'un PC
- Interface ROS (Robot Operating System) pour faire fonctionner le robot à l'aide du système d'exploitation ROS
- Interface pour les caméras de détection d'objets
- Interface cloud pour la surveillance à distance de l'état du robot
Cinématiques prises en charge
L'iguverse prend en charge une variété de cinématiques (mouvements de base) qui définissent le mouvement contrôlé du robot. En plus des cinématiques préconfigurées, il est possible de configurer jusqu'à trois autres axes cinématiquement indépendants dans IRC. La cinématique préconfigurée comprend :
- Robots delta à 2 axes et 3 axes
- Robots portiques,
- 2 axes (axes X et Y)
- 2 axes (axes Y et Z)
- 3 axes (axes X, Y et Z)
- Bras robotiques (cobots),
- 3 axes (axes 1, 2, 3)
- 3 axes (axes 2, 3, 4)
- 4 axes (axes 1, 2, 3, 4)
- 4 axes (axes 2, 3, 4, 5)
- 5 axes (axes 1 à 5)
- 6 axes (axes 1 à 6)
- Robot SCARA à 4 axes
Simplicité de programmation pour une automatisation à moindre coût
Les robots d'Igus et l'IRC sont conçus pour favoriser une automatisation à faible coût. Cela ne serait pas possible sans une interface de programmation conviviale. Une souris à 3 boutons ou une manette de jeu permettent de déplacer et de positionner un robot dans l'iguverse. Grâce au logiciel IRC, un utilisateur peut déplacer librement tous les axes du jumeau numérique dans l'interface 3D. Une fonction d'apprentissage permet de développer un logiciel de commande de robot, même sans qu'un robot physique ne soit connecté.
Pour mettre en œuvre l'apprentissage, l'utilisateur déplace manuellement le robot virtuel jusqu'à la position requise et définit son mode de déplacement. Le processus se répète jusqu'à ce que le profil de mouvement complet ait été créé. Le centre d'outils du logiciel IRC permet aux utilisateurs d'ajouter des effecteurs finaux correspondants, comme des pinces, et d'ajuster facilement et automatiquement le point central de l'outil sur le robot. De plus, il est possible d'ajouter une connexion à un système de contrôle industriel de niveau supérieur.
Le processus commence par l'activation du robot à l'aide des boutons de connexion, de réinitialisation et d'activation, selon les besoins dans l'interface. Le voyant d'état de l'IRC doit devenir vert et l'état doit indiquer l'absence d'erreurs. Le profil de mouvement peut maintenant être saisi à l'aide de l'onglet « Jogging » (Figure 2).
 in the iguverse immersive development environment (click to enlarge)") Figure 2 : L'onglet « Jogging » (en bas à gauche) dans l'environnement de développement immersif iguverse peut être utilisé pour saisir des profils de mouvement. (Source de l'image : Igus)
Figure 2 : L'onglet « Jogging » (en bas à gauche) dans l'environnement de développement immersif iguverse peut être utilisé pour saisir des profils de mouvement. (Source de l'image : Igus)
Robots portiques
Les robots portiques, comme ceux inclus dans les exemples précédents de l'iguverse, sont constitués de deux axes X de base, d'un axe Y et d'un axe Z facultatif. L'axe Y est relié aux deux axes X parallèles et se déplace d'avant en arrière dans l'espace bidimensionnel. L'axe Z en option prend en charge une troisième dimension de mouvement.
Les robots portiques d'Igus sont dotés de revêtements en plastique autolubrifiants qui permettent un glissement et un roulement plus fluide et plus silencieux que les conceptions traditionnelles à roulements à billes. La nouvelle conception est plus légère, résiste à la corrosion et ne nécessite pas d'entretien, ce qui est important pour les PME. Également essentiel pour les PME, ces robots coûtent jusqu'à 40 % de moins que les robots portiques traditionnels, ce qui permet un retour sur investissement plus rapide.
Ces robots sont adaptés à deux classes d'applications : faibles vitesses avec charges élevées ou vitesses élevées avec faibles charges. Parmi les applications représentatives, citons les opérations de conditionnement, de prélèvement et de placement, d'étiquetage, de manutention et d'assemblage.
Ils se déclinent en différentes tailles. Les accessoires disponibles comprennent des accouplements, des effecteurs terminaux et des brides de moteur. Voici quelques exemples de robots portiques de taille moyenne :
- Le DLE-FG-0006-AC-650-650 est un portique plat bidimensionnel avec un espace de travail de 650 mm x 650 mm. Ce robot peut gérer des charges utiles jusqu'à 8 kg et dispose d'une cadence dynamique allant jusqu'à 20 prises par minute.
- Le DLE-RG-0012-AC-800-800-500 est un portique tridimensionnel avec un espace de travail de 800 mm x 800 mm x 500 mm. Il peut gérer des charges utiles jusqu'à 10 kg avec une cadence dynamique allant jusqu'à 20 prises par minute.
Prouesses en matière de palettisation
La palettisation des produits en vue de leur expédition fait partie des activités quotidiennes des entreprises de fabrication et de logistique. Le membre le plus récent et le plus grand de l'iguverse est le robot portique de taille XXL avec un espace de travail de 2000 mm x 2000 mm x 1500 mm, parfaitement adapté aux applications de palettisation jusqu'à 10 kg. Des conceptions personnalisées avec des espaces de travail jusqu'à 6000 mm x 6000 mm x 1500 mm sont disponibles.
Ces robots portiques peuvent prélever des objets pesant jusqu'à 10 kg, les transporter à une vitesse allant jusqu'à 500 mm/s et les placer sur une palette avec une répétabilité de 0,8 mm (Figure 3). La solution de robot de palettisation d'Igus coûte jusqu'à 60 % de moins que les systèmes comparables.
 Figure 3 : La palettisation représente une activité courante et importante dans les secteurs de la fabrication et de la logistique. Elle peut être automatisée à l'aide d'un robot portique. (Source de l'image : Igus)
Figure 3 : La palettisation représente une activité courante et importante dans les secteurs de la fabrication et de la logistique. Elle peut être automatisée à l'aide d'un robot portique. (Source de l'image : Igus)
Robots delta
À l'instar des robots portiques, les robots delta sont disponibles avec deux ou trois axes. Les robots delta présentent une enveloppe de travail en forme de dôme montée au-dessus de l'espace de travail. Ils se caractérisent par des vitesses exceptionnellement élevées et sont souvent utilisés pour la manutention de matériaux et le placement de composants. Voici quelques exemples de robots delta d'Igus :
- RBTX-IGUS-0047 : il s'agit d'une conception à trois axes avec un diamètre d'espace de travail de 660 mm. Il affiche une précision de ±0,5 mm, une charge utile maximale de 5 kg, une vitesse maximale de 0,7 m/s et peut effectuer jusqu'à 30 prises par minute. (Figure 4).
- RBTX-IGUS-0059 : il s'agit d'une conception à 2 axes avec un diamètre d'espace de travail de 700 mm. Il affiche également une précision de ±0,5 mm. Sa charge utile maximale est de 5 kg, sa vitesse maximale est de 2 m/s et il peut effectuer jusqu'à 50 prises par minute.
 Figure 4 : Exemple d'un robot delta à trois axes à côté d'un iRC d'Igus (à gauche). (Source de l'image : DigiKey)
Figure 4 : Exemple d'un robot delta à trois axes à côté d'un iRC d'Igus (à gauche). (Source de l'image : DigiKey)
Cobots à bras articulés
L'iguverse prend également en charge les cobots à bras articulés. Les cobots peuvent compter de deux à dix axes ou plus, également appelés degrés de liberté (DOF). Ils disposent généralement de larges enveloppes de travail et peuvent réaliser des tâches complexes en collaboration avec un opérateur humain. Le modèle REBEL-6DOF-02 d'Igus offre 6 degrés de liberté, le modèle REBEL-4DOF-02 4 degrés de liberté. Les deux bénéficient d'une précision de ±1 mm et d'une plage de travail nominale de 400 mm. Ils peuvent effectuer un minimum de 7 prises par minute avec une vitesse linéaire de 200 mm/s.
Le modèle à 6 DOF présente une charge utile maximale de 2 kg et une portée maximale de 664 mm. Le modèle à 4 DOF présente une charge utile maximale de 3 kg et une portée maximale de 495 mm (Figure 5).
 and 6 DOF (right)") Figure 5 : Cobots à bras articulés avec 4 DOF (à gauche) et 6 DOF (à droite). (Source de l'image : Igus)
Figure 5 : Cobots à bras articulés avec 4 DOF (à gauche) et 6 DOF (à droite). (Source de l'image : Igus)
Résumé
Le métavers industriel immersif iguverse combine les jumeaux numériques et la réalité virtuelle pour fournir des outils permettant le développement et le déploiement rapides de solutions robotiques. Il est gratuit, sans licence et conçu pour fonctionner localement sur un PC sans connexion cloud. Il peut être utilisé pour développer et tester des solutions robotiques sans la présence physique d'un robot.
Il prend en charge une large gamme de cinématiques pour les robots delta, les robots portiques, les bras robotiques (cobots) et les robots SCARA. Le logiciel IRC propose une série d'interfaces pour répondre aux besoins d'automatisation et d'exploitation, notamment une interface PLC, Modbus TCP/IP, CRI Ethernet, une interface ROS, une interface pour les caméras de détection d'objets et une interface Cloud. L'iguverse, l'iRC et les robots associés d'Igus ont été optimisés pour répondre aux besoins d'automatisation à faible coût des PME.
Avertissement : les opinions, convictions et points de vue exprimés par les divers auteurs et/ou participants au forum sur ce site Web ne reflètent pas nécessairement ceux de DigiKey ni les politiques officielles de la société.